PetalView: Fine-Grained Location and Orientation Extraction of Street-View Images via Cross-View Local Search
Abstract
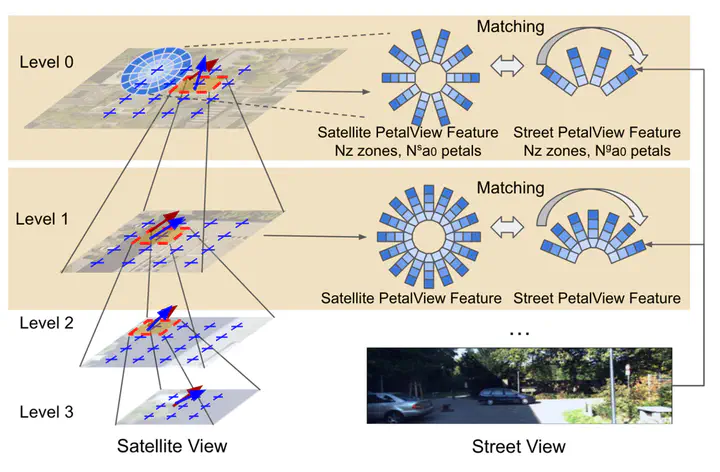
Satellite-based street-view information extraction by cross-view matching refers to a task that extracts the location and orientation information of a given street-view image query by using one or multiple geo-referenced satellite images. Recent work has initiated a new research direction to find accurate information within a local area covered by one satellite image centered at a location prior (e.g., from GPS). It can be used as a standalone solution or complementary step following a large-scale search with multiple satellite candidates. However, these existing works require an accurate initial orientation (angle) prior (e.g., from IMU) and/or do not efficiently search through all possible poses. To allow efficient search and to give accurate prediction regardless of the existence or the accuracy of the angle prior, we present PetalView extractors with multi-scale search. The PetalView extractors give semantically meaningful features that are equivalent across two drastically different views, and the multi-scale search strategy efficiently inspects the satellite image from coarse to fine granularity to provide sub-meter and sub-degree precision extraction. Moreover, when an angle prior is given, we propose a learnable prior angle mixer to utilize this information. Our method obtains the best performance on the VIGOR dataset and successfully improves the performance on KITTI dataset test~1 set with the recall within 1 meter (r@1m) for location estimation to 68.88% and recall within 1 degree (r@1d) 21.10% when no angle prior is available, and with angle prior achieves stable estimations at r@1m and r@1d above 70% and 21%, up to a 40-degree noise level.
Hu Wenmiao
Ph.D. candidate & Ph.D. Researcher
Ph.D. National University of Singapore (2024), Ph.D. researcher at Grab, Grab NUS AI Lab.